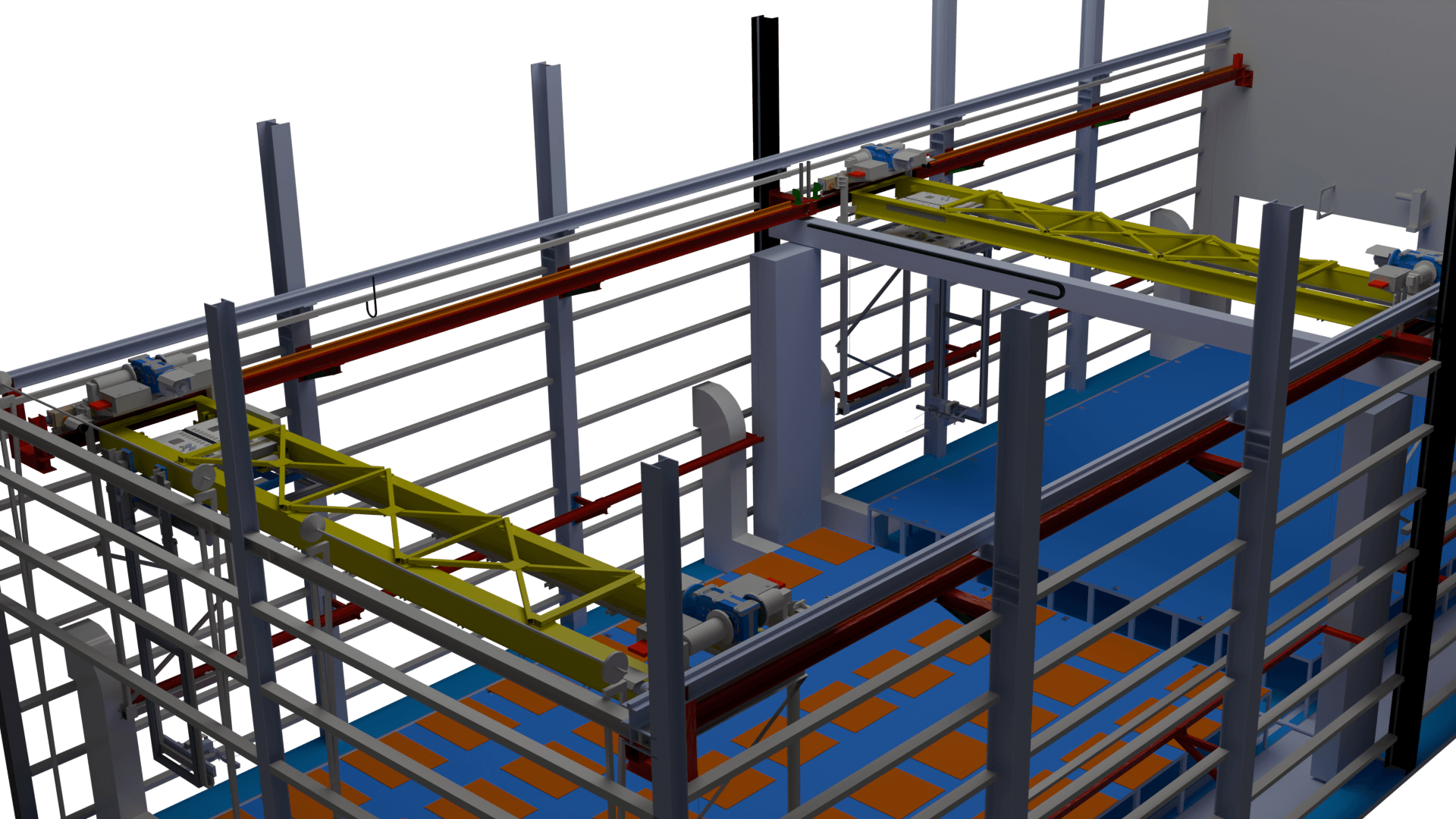
Within this project, we prepared a complete design and construction documentation of the mechanical part of the handling equipment, the aim of which was to verify the function, accuracy and technical feasibility of the design with regard to the specific requirements of the operation and the spatial arrangement of the hall.
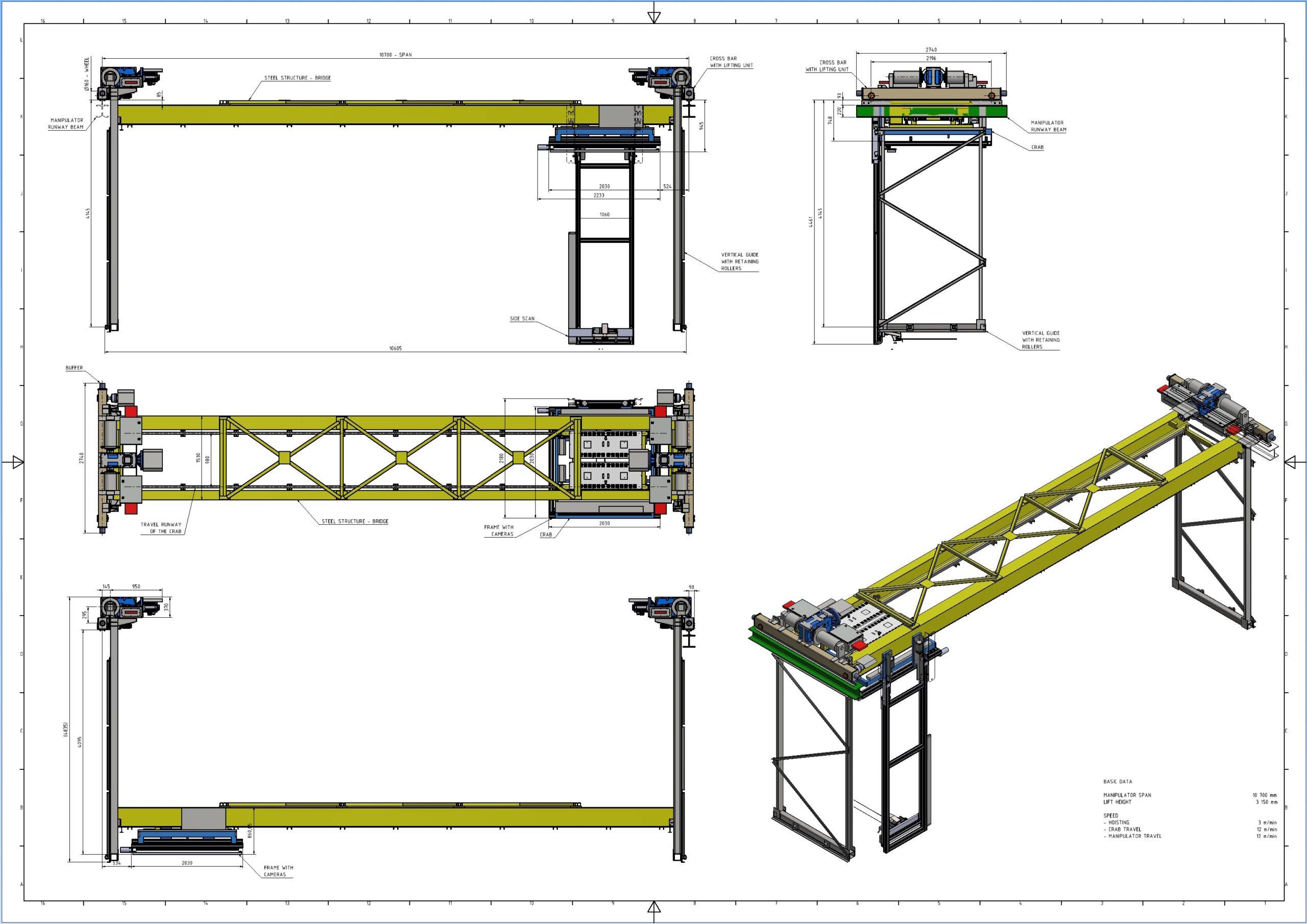
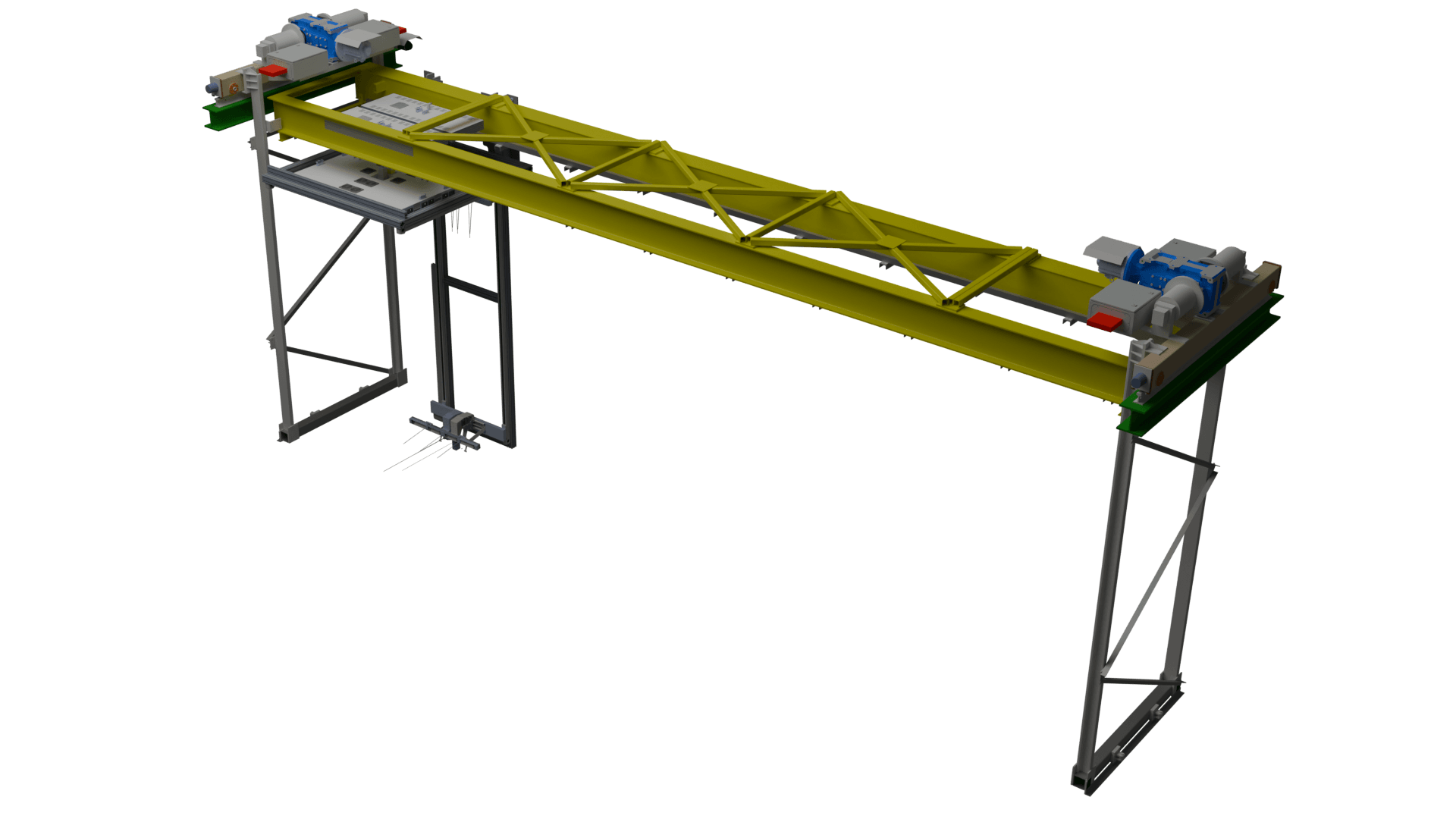
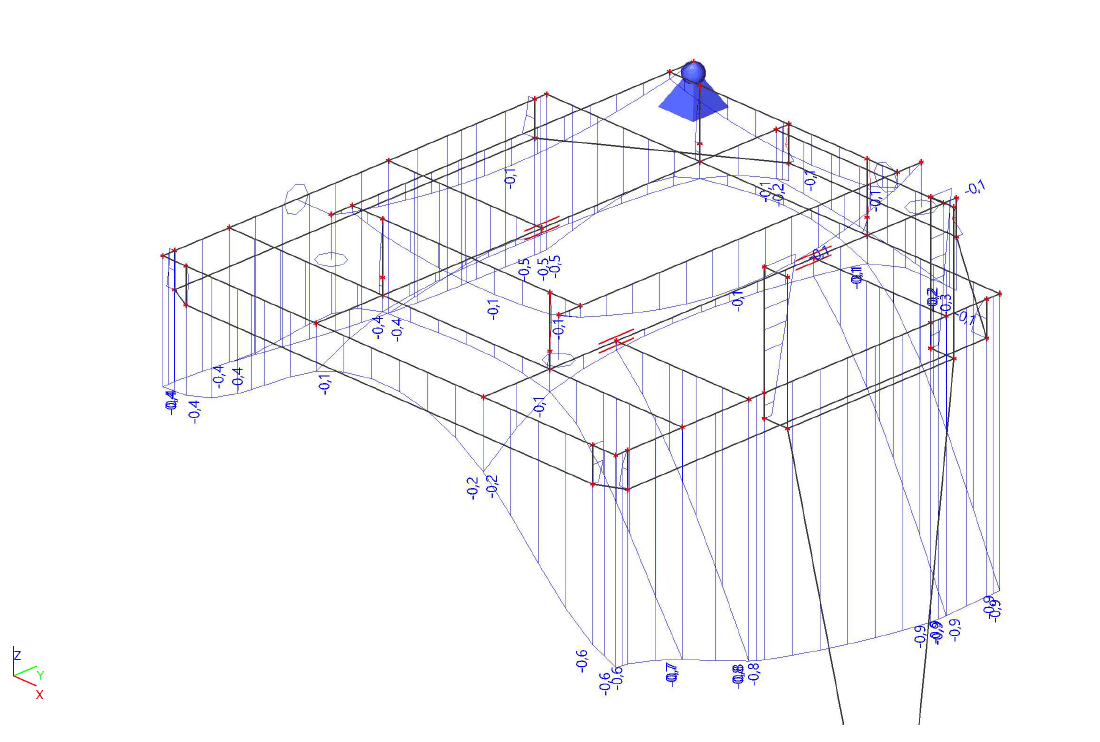
Part of the delivery was a mechanical project including the design of the manipulator structural assembly, including travel, guide and lifting mechanisms, electrical equipment and power supply system design, and determination of preliminary wheel pressures for the load assessment of the hall structure. The design was developed to allow verification of the actual clearances and accuracy of the manipulator guidance in the X, Y and Z axes.
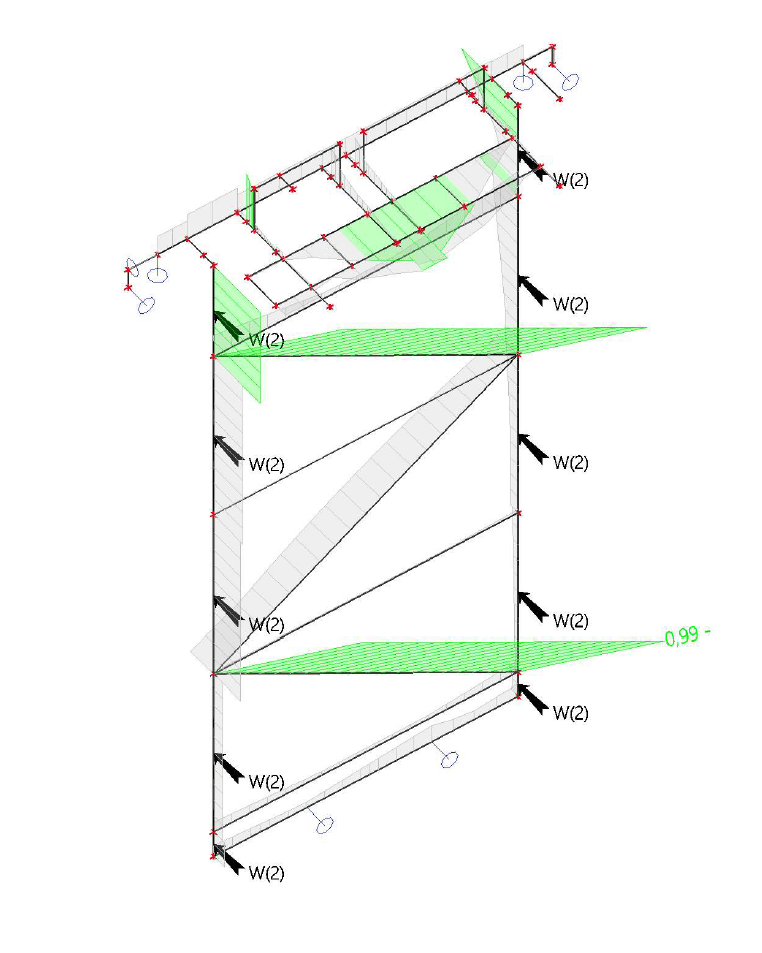
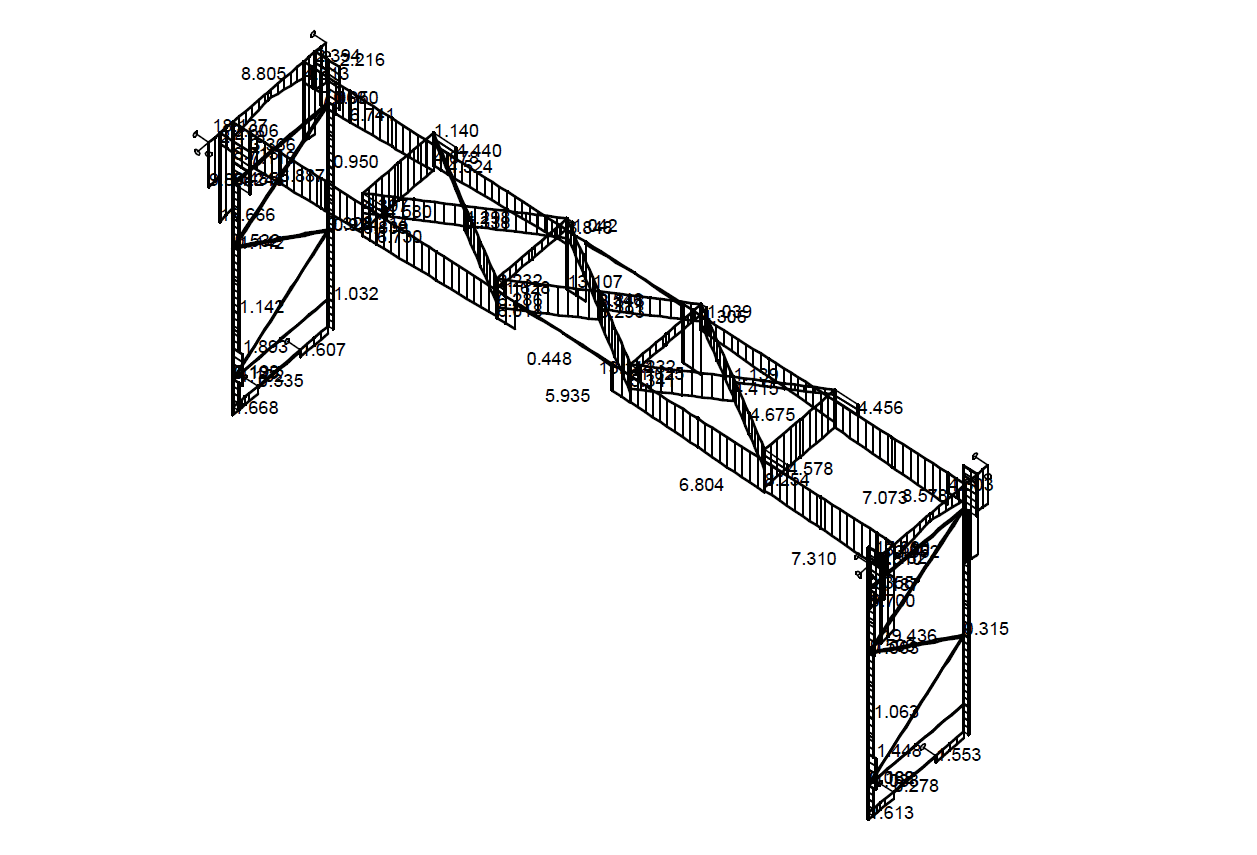
This design was followed by the development of design documentation that took into account the choice of materials, surface treatments, heat treatment requirements and the design of all equipment nodes. During the preparation of the documentation, static, strength and functional calculations of the mechanisms and structural components were carried out, including optimisation calculations that allowed the weight of the structure to be reduced while maintaining the necessary rigidity and safety.
The project also included the design of the upper travel and guideway and the lower guideway of the manipulator, their dimensioning and spatial evaluation with regard to the actual conditions of assembly. Since the delivery did not include a complete electrical design, our documentation was supplemented with design modifications for the mounting of the electrical elements, their attachment, protection and integration into the manipulator system, including the determination of the types and locations of safety limit switches.
In addition, the types of gearboxes for the individual movements of the manipulator were determined and cooperation with the production and assembly organization was ensured - both in the preparatory phase and during the actual implementation. Consultations included solutions for the suspension of the individual units, determination of the centres of gravity, handling during assembly and coordination of the wiring.